homelab Why I Containerized My Entire Homelab (And the One Mistake That Broke Everything First) How a Christmas gift, a seven-year gap, and a very confusing mount path problem convinced me to containerize everything — and why I'll never go back to bare metal.
homelab My Homelab in 2026: 32 Containers, 85TB, and an Arc A380 That Changed Everything A tour of balor — the server in my closet running 32 Docker containers, a MergerFS storage pool, and an Intel Arc A380 that handles media transcoding so the CPU doesn't have to.
Meshtastic Scrolling Meshtastic Messages on an 8x32 WS2812B LED Panel: Custom Firmware, MQTT, and the Decryption Part Nobody Explains A custom ESP32 build that subscribes to Meshtastic's encrypted MQTT topic, decrypts packets on the fly, and scrolls messages across a WS2812B 8x32 LED panel. Full build guide: parts, wiring, PlatformIO flashing from scratch, and MQTT setup.
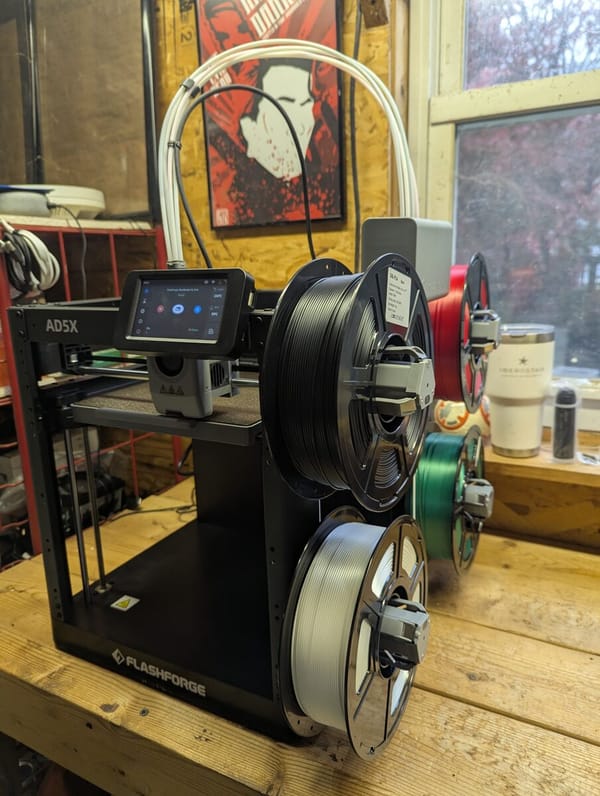
3D Printing Less Than a Week and the Warranty Is Already Gone: Installing ZMOD on the AD5X I had the AD5X for less than a week. I hadn't done a second print yet. And I was already on GitHub reading about ZMOD. ZMOD is a community firmware mod for the Flashforge AD5X. It replaces the stock firmware with something you can actually get into: SSH
3D Printer Retiring the Anet A8: Eight Years, One Close Call, and a Printer That Came Assembled Eight years with the Anet A8, from MOSFET mods and melting connectors to retirement. A look at what it took to keep a notorious fire hazard running, and why the Flashforge AD5X is a better way to spend a weekend.
Life got in the way Seven Years, One Heart Attack, and a Whole Lot of Solder Seven years of silence, one heart attack, a marriage, a career change, and a travel habit. Catching up on everything that happened while the blog was dark.
Android Using Ubuntu touch on a Nexus 5 Installing Ubuntu Touch on a Nexus 5 to use it as a portable RTL-SDR server. A walkthrough of what worked, what didn't, and whether it was worth the afternoon.
Linux Loftek LK5200 as an rtl-sdr server Turning a four-year-old Loftek LK5200 router into an RTL-SDR server by installing OpenWRT. Because why have a normal router when you can have a slightly cursed one.
Ham Radio POCSAG on the Raspberry Pi Decoding POCSAG pager traffic on a Raspberry Pi with an RTL-SDR, shortly after getting an amateur radio license. A general class ticket, a Pi, and way too much time on my hands.
Linux BBS in 2019!? Say What? Setting up a BBS in 2019 for no practical reason other than nostalgia and underemployment. A trip back to pre-internet networking with a modern twist.
3D Printer Upgrading the ANET A8 with Ramps 1.4 When the Anet A8's stock mainboard gave up on one stepper driver, the obvious fix was to replace the entire board with a RAMPS 1.4. A walkthrough of the swap, the firmware, and the inevitable wiring mistakes.
Kodi Hyperion+RetroPie+Kodi=Bliss! Adding Hyperion ambilight LEDs to a RetroPie and Kodi setup on a Raspberry Pi. Blinky lights that actually respond to what's on screen, including SteamLink.
3D Printing Squirrel Camera! Building a motion-triggered squirrel cam with a Raspberry Pi after finding the porch pumpkins under attack. A quick project that mostly already existed and just needed assembling.
Media Center Full setup of Retropie. A complete walkthrough of setting up RetroPie on a Raspberry Pi 3, from image flashing to controller configuration, working entirely in Linux.
Linux Tails installer errors on wipefs Troubleshooting Tails installer errors on wipefs during installation to a USB drive. The specific error, what caused it, and how to get past it.
Kodi Replacing a PC and Pogoplug with a Raspberry Pi 3 Consolidating a desktop PC and a Pogoplug into a single Raspberry Pi 3. Pihole, Kodi database, download scheduling, and a shared 10TB NAS, all on one small board.
Media Center RetroPIe! First impressions and setup notes from getting RetroPie running on a Raspberry Pi 3, including a tip on relocating the home folder to USB for easier game management.
Android Sideloading apps Getting past a parental control PIN on an Android TV stick to sideload apps. The specific workaround for when you can't launch app configuration without a PIN you don't have.
Kodi Raspberry Pi 3 -- Finally using it Finally putting the Raspberry Pi 3 to work with MythTV and Kodi, after it sat idle since launch. Setup notes and a comparison to older Pi models.
DRM Update: Lightbulb DRM- Firmware update blocks unapproved third-party bulbs. Philips Hue's firmware update blocked third-party bulbs, then they reversed it. A reminder that IoT devices you buy aren't always yours to control.
Kodi The things I do to myself. Attempting to run a MythTV backend on a Raspberry Pi B+. A story of ambition, thermal limits, and eventually knowing when a project isn't worth finishing.
Drone Successfully shooting the gap - YouTube A quadcopter video of a successful gap shot between roof and railing, immediately followed by getting stuck in a tree and breaking a motor. Worth it.