Well, it has been a while. Seven years of silence on a blog is probably enough to have most people assume the author has either died, found religion, or gotten a real job. In my case, it was almost all three, but I’ll get to that.
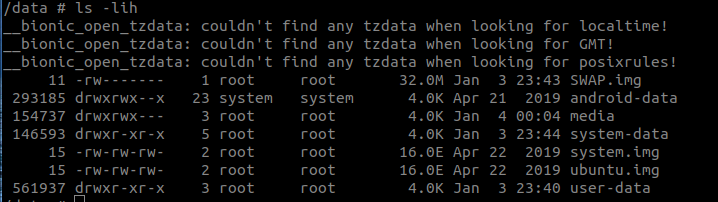
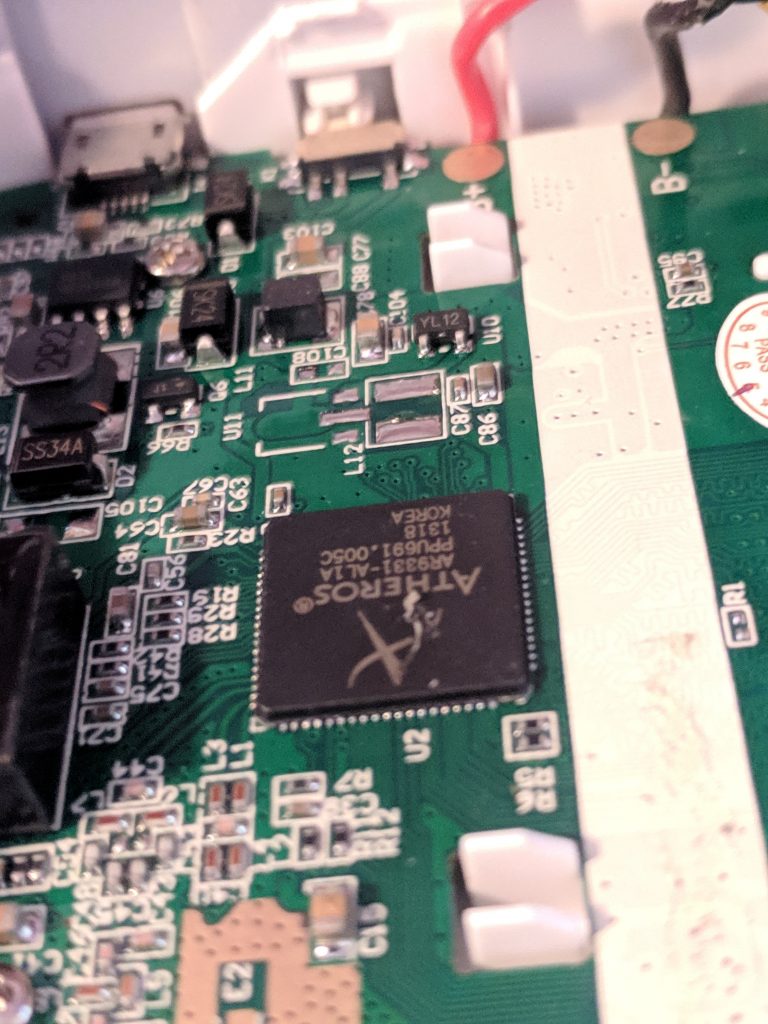
If you’re reading this, congratulations on your patience, your morbid curiosity, or your inability to clean out your RSS reader. Regardless of why you’re here, welcome back. I have some catching up to do, and I promise to be as disorganized about it as you’d expect from someone who once spent a weekend trying to turn a travel router into an SDR server.
The Part Where I Almost Died (Casually)
So, 2023 was an interesting year. I had a heart attack. I know, I know, you’d think someone who spends most of their time sitting in front of screens and soldering irons would be the picture of cardiovascular health. Turns out, your heart doesn’t care how many Linux boxes you’ve configured. It was one of those life-altering moments that makes you reconsider your priorities, eat a salad occasionally, and then immediately go back to doing exactly what you were doing before because you’re fundamentally incapable of change. I’m fine now, mostly. The doctors say I need to take it easy. I interpret “take it easy” as “continue doing everything but feel slightly guilty about it.”
The Part Where I Got Married
In 2018, I got married. Yes, someone willingly signed up for a lifetime of me explaining mesh networking at dinner and impulse-buying microcontrollers. She is a saint, or possibly just hard of hearing, either way, it works. The wedding was lovely, and I only had to be asked twice to stop checking my phone for satellite pass notifications during the ceremony.
Career: From Auto Parts to Actual IT
For those who remember, I spent a good chunk of my career in the auto parts world. I have since transitioned away from the counter and into an IT role for the shops themselves. Same industry, completely different headaches. Instead of looking up brake rotors and arguing about core charges, I’m now the guy migrating a scattered mess of standalone systems into something more centralized and, dare I say, manageable. The goal is to make it easier for the shops to actually access and use the tools they’re already paying for, a concept that apparently qualifies as revolutionary in an industry that still has fax machines in active service.
It’s been a journey of consolidation, automation, and explaining to people why “it worked fine before” is not a valid argument against progress. I do come home smelling like desperation after fighting Group Policy for eight hours, but at least I no longer have brake cleaner stains on my shirts. Trade-offs.
Travel: Apparently I Leave the House Now
One of the more surprising developments of the last several years is that I have become someone who travels. If you knew me in the early blog days, you’d know that my idea of adventure was running an experimental firmware on a device I couldn’t afford to replace. Times have changed.
Here’s the damage report:
- Italy (2017). My first real international trip. Turns out the world is bigger than Northeastern Pennsylvania. Who knew? The food was incredible, the history was humbling, and I only tried to find open Wi-Fi networks at historical landmarks twice. Maybe three times.
- Ireland (2018). Green. So incredibly green. Also, Guinness does taste better there, and I will die on that hill (hopefully not of another heart attack).
- UK (2019). London, among other places. I spent an unreasonable amount of time in museums and an even more unreasonable amount of time trying to figure out how the tube system works. I am an IT professional who builds mesh networks, and the Oyster card nearly defeated me.
- Dominican Republic (Multiple Trips), This has become something of a recurring destination. At this point, I think I qualify for some sort of frequent visitor status. The resort staff have started to recognize me, which is either flattering or a sign that I need to diversify my vacation portfolio.
- Poland (2024). Absolutely beautiful country. The history, the architecture, the food — all of it was fantastic. I went in with minimal expectations and came out wondering why it took me this long to visit.
- Ireland (2025). Yes, again. I told you, it’s really green. Second time around and I still wasn’t over it. At this rate I’m going to end up retiring there and becoming the weird American who builds Meshtastic nodes on the Cliffs of Moher.
- Poland (2026). Back again already. If I keep this up, I’m going to need to learn more Polish than “dziękuję” and “piwo proszę.” Though honestly, those two words have gotten me surprisingly far.
Community: I Found My People
One of the best things to come out of the last few years is getting involved with some local groups that cater directly to my particular brand of nerdery.
NEPAMesh (nepamesh.com)
I’ve been working with NEPAMesh, a local group of Meshtastic enthusiasts here in Northeast Pennsylvania’s Wyoming Valley. For the uninitiated, Meshtastic is an open-source project that enables long-range, off-grid communication using affordable LoRa radio hardware, no cell towers, no internet, no monthly fees. It’s the kind of thing that makes my inner radio nerd absolutely giddy. The group has been building out a local mesh network since early 2024, and I’ve been contributing nodes, including some solar-powered ones because apparently I now build things that live outdoors. The irony of an indoor person building outdoor infrastructure is not lost on me.
HackWorks (hackworks.us)
I also joined HackWorks, a local makerspace. They offer access to tools, equipment, 3D printers, classes, and most importantly, a community of people who don’t look at you funny when you explain what you’re building. Having access to a proper workspace has been a game-changer, and it’s nice to be around fellow makers who understand that “I just need one more component” is both a lie and a lifestyle.
DCG570
I’ve also been attending DCG570, the local DEF CON group. For those unfamiliar, DEF CON groups (DCGs) are local community meetups affiliated with the DEF CON hacking conference. It’s a fantastic group of security-minded individuals, and attending has been a great way to keep my skills sharp, learn new things, and remind myself that no matter how much I think I know, there’s always someone who knows more. Humbling, educational, and occasionally terrifying, my three favorite adjectives.
Hardware Hacking: Because Software Wasn’t Enough
The tinkering hasn’t stopped, if anything, it’s gotten worse. Between hardware modifications, building solar-powered Meshtastic nodes, and whatever the makerspace enables me to get my hands on, I’ve been busier than ever. The solar nodes have been a particularly fun project; there’s something deeply satisfying about building a communications device that powers itself and just sits on a mountaintop doing its job without any intervention. It’s everything I aspire to be: self-sufficient, solar-powered, and silently useful. I am none of these things, but the nodes are, and I built them, so I’m claiming it by association.
What’s Next
More posts are coming. I know, I know, you’ve heard that before. But this time I mean it, in the same way that I “meant it” in 2019 when I said I’d post more regularly and then went radio silent for seven years. The difference now is that I have more projects, more communities, and more things to talk about than ever before. Plus, I nearly died, so I’ve got that whole “life is short, document your nonsense” motivation going for me.
Stay tuned. Or don’t. I’ll be here either way, building things that don’t need to exist and writing about them far too late.